Abstract
Brain-computer interfaces (BCI) are used to translate brain signals into control commands for external devices. Non-invasive systems based on electroencephalography (EEG) often lack necessary spatial resolution and bandwidth, e.g., to decode complex hand movements. In contrast, magnetoencephalography (MEG) that is typically based on superconducting quantum interference devices (SQUIDs) offers higher spatial resolution and bandwidth, but requires the participant to sit still with the head immobilized because the liquid helium-cooled sensors have to remain at a fixed position. In this project we use a new MEG technology called optically pumped magnetometers (OPM) which promises to overcome the limitations of EEG and SQUID-MEG. With OPMs, we attempt to combine the best of both worlds, EEG and MEG, to achieve high-dimensional BCI hand exoskeleton control. For the classification of motor execution and imagery, event-related (de)synchronization is often used in the BCI community. To achieve this with the new OPM sensors, we have built a flexible BCI framework for OPM-based MEG that aims to improve versatility of BCIs. With our system we pave the way to systematically investigate the neural substrates of BCI learning and BCI-triggered neuroplasticity.Optically Pumped Magnetometers
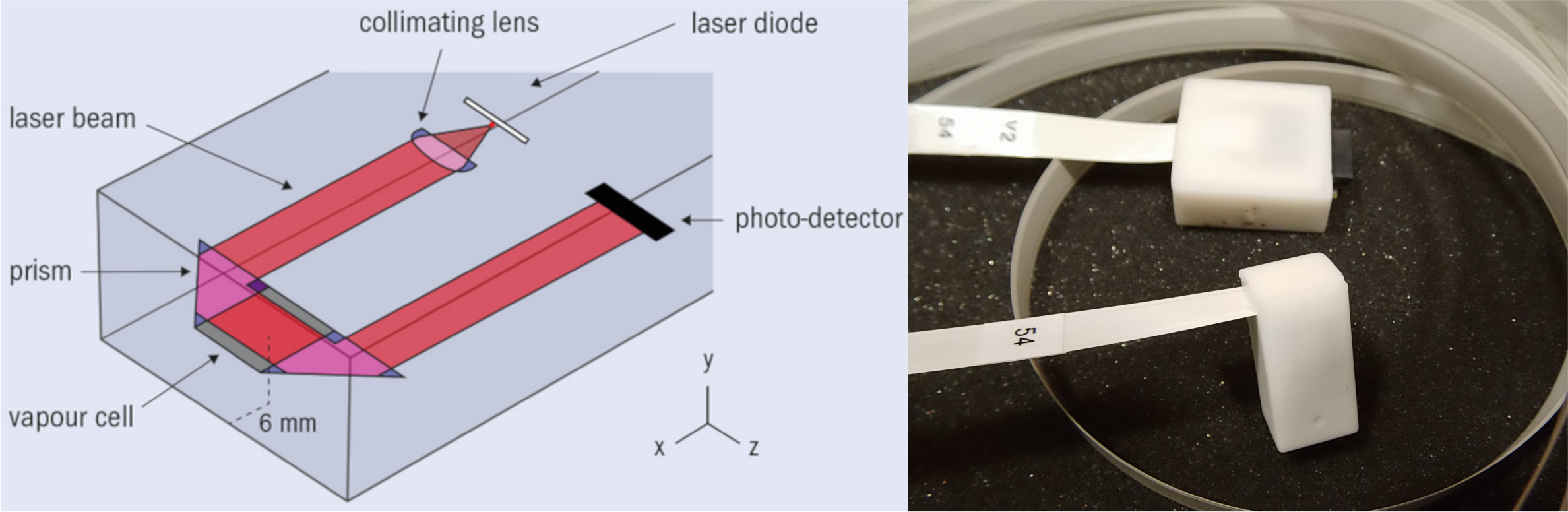
Optically pumped magnetometers (OPM) take advantage of the atomic spins of an atomic vapor in a small sensing cell. In a magnetic field, the atomic spins preccess with a frequency proportional to the magnetiс field. This in turn causes the optical properties of the vapor to be field dependent and thus the atoms can be read out by laser light. The preparation process of spin polarization is also carried out by laser light and is called "optical pumping". A special type of OPMs, the so-called SERFSpin-Exchange Relaxation Free OPM, is able to measure even the tiny magnetic fields of the human brain. In contrast to the earth's magnetic field of about 50 µT1 µT=10-6 T these fields are about a million to a billion times smaller, in the order of femtotesla to picotesla1 fT=10-15 T1 pT=10-12 T
. But, to operate these magnetometers, very small ambient magnetic fieldsin the order of a few nT (10-9 T) are needed.

shielding factor above 108 at f>10 Hz accessible by humans (Thiel et al., 2007). For example, that means a compass does not work inside. In this environment, our OPM sensors can measure the magnetic signals that originate from the brain. The advantage of OPM sensors over superconducting quantum interference device magnetoencephalography (SQUID-MEG) is that OPMs do not require constant liquid helium-coolingabout -269°C and can be fit in a 3D-printed helmet to any subject's head. They can therefore be placed much closer to the head, thus picking up much stronger signals. Further, in contrast to electric fieldsas measured with EEG, magnetic fields penetrate the tissue almost unaffected and thus enable us to obtain a higher spatial resolution and improved reconstruction of sources in the brain.
If you want to learn more about OPMs and how they work, we recommend Coleman & Brookes (2021), Hill et al. (2020), Knappe et al. (2014/2019) or Tierney et al. (2019).
Occipital Alpha and Real-Time Processing
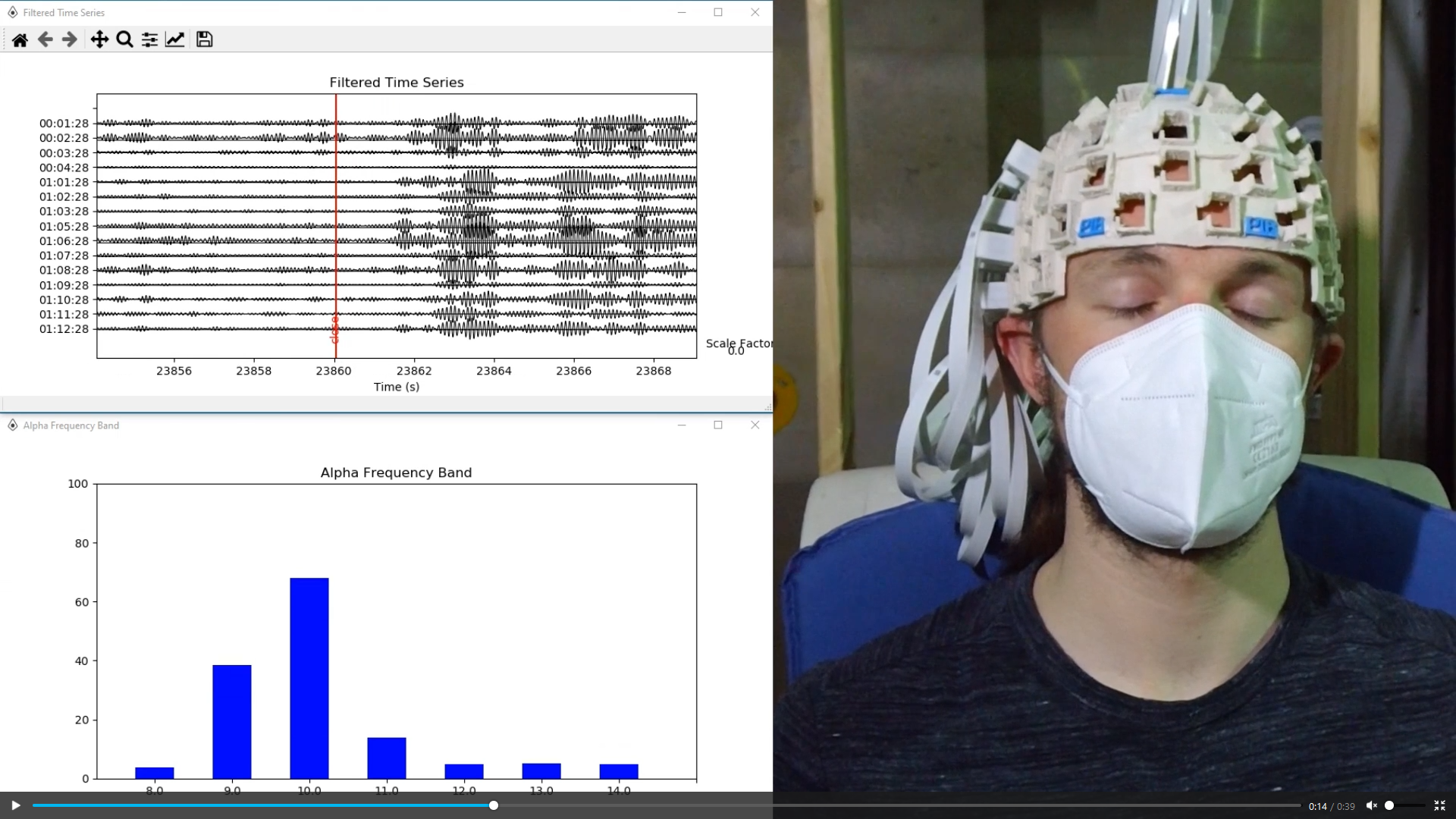
Neural oscillations in the alpha rangearound 8-12 Hz were first discovered by Hans Berger in the 1920s and have since been investigated for their prominence in any electroencephalogram (EEG). The same phenomenon is also visible in MEGMagnetoencephalography.To reach our goal of building a brain-computer interface, we took advantage of this strong effect to build a proof-of-principle processing pipeline that can acquire, pre-process, analyze and record the OPM data in real-time. All data transfer between the processing stages is done with LabStreamingLayer (LSL) and NeuroPype.
As you see below, we built a pipeline that allows us to visualize and plot the data we record from the occipital lobe in real-time (Zerfowski et al., in prep.).
Brain-Computer Interfaces
With brain-computer interfaces (BCI), we aim to translate brain activity into control commands of external devices, e.g., prosthetics or exoskeletons (Soekadar et al., 2016). The so-called sensorimotor rhythm (also termed μ-rhythm8-13 Hz) event-related (de)synchronization (ERD/ERS) is measurable over the motor cortex when the user executes or imagines a movement.With the new OPM sensor technology, our lab at the Charité aims to build a system that can be used in the therapy of stroke patients, to investigate the underlying mechanisms of BCI learning and neuroplasticity.
Below you see a demonstration of an EEGElectroencephalograpy/EOGElectrooculography-based system that enabled a patient to eat by himself for the first time in years:

Do you want to know more about BCIs, ERD or therapy using these technologies? Take a look at Soekadar et al. (2011, 2016) and Lal et al. (2005)!
Remaining Challenges
To use an exoskeleton hand together with the OPMs, it must not have any ferromagnetic parts, since these would - when moving - result in measurement artifacts. Therefore, we have to use a specially-designed exoskeleton which contains no metal parts. It is driven by a control unit outside the MSRMagnetically Shielded Room and the individual fingers are moved using Bowden cables. You can see such an exoskeleton hand in action below:
There is still a long way to go before our system will be used in a clinical context. However, there is rapid technological progress and a lot of exciting research pursued with and on optically pumped and other magnetometerse.g., Nitrogen-vacancy centers. We therefore expect that this technology will play an important role in clinical neuroscience and beyond.
